Multi-Camera Calibration
What would be done in this tutorial:
- Prepare calibration target config file -
./april_5x5.yaml
Optionally:
- Prepare imu config file -
./imu.yaml
TL; NR (Calibration Procedures)
Calibration Target
It is strongly recommended to use Aprilgrid as the calibration target as
- partially visible calibration boards can be used
- pose of the target is fully resolved (no flips)
More details can be found on the Kalibr's wiki page, and a sample grid starting from detection id 0 is available here.
Below is the current Aprilgrid calibration board we are using and its corresponding .yaml file.
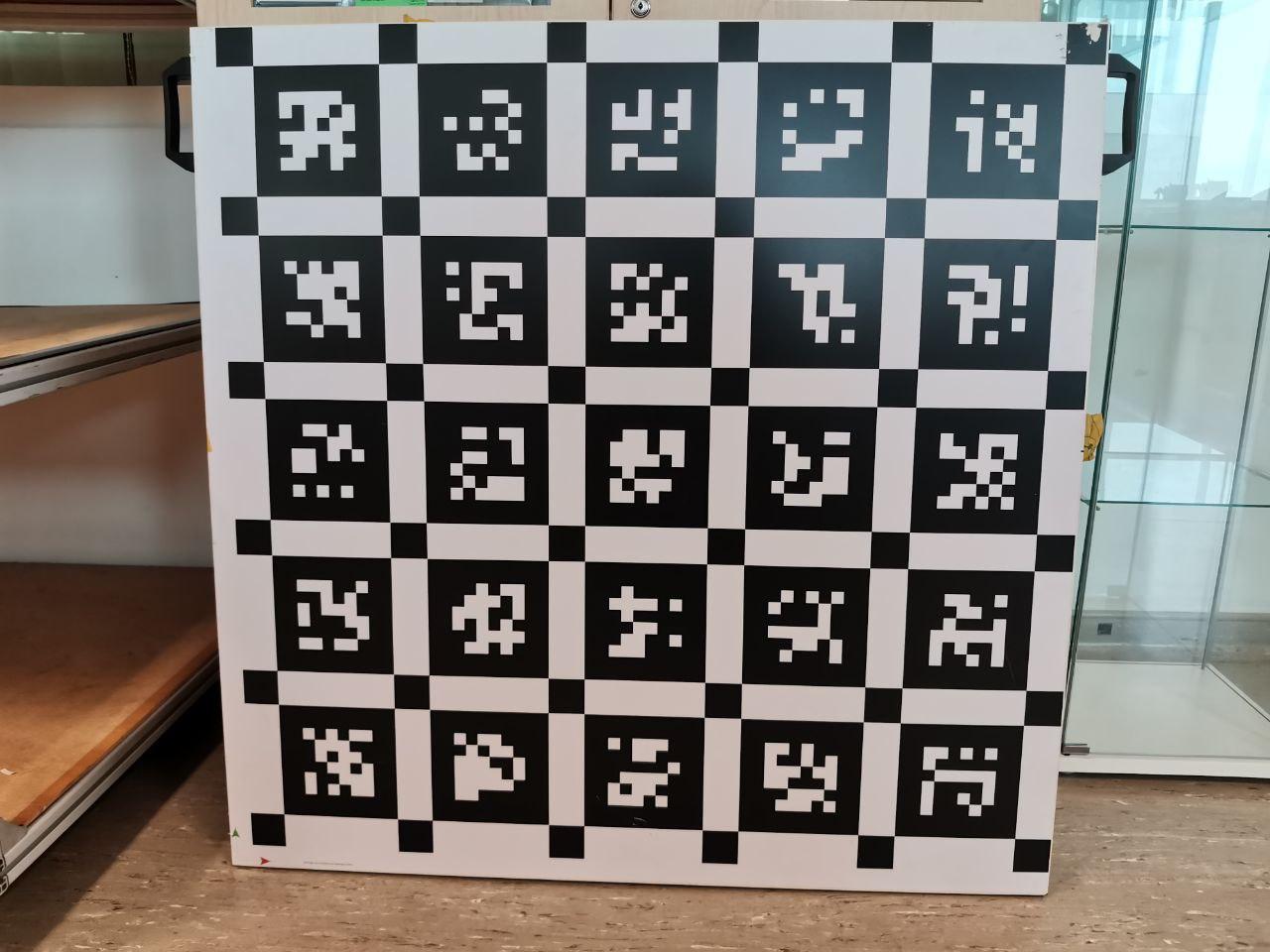
About low_id
Observe that the first grid (closest to the coordinate marker) in the board above has the same encoding as the 26-th grid in a typical board. This is because the board we are using is purpose-made to start from a different id other than the default zero. Therefore, the low_id field is to be added in the yaml file to tell the calibration algorithm about this fact.
The stock Kalibr pacakges does not support defining the lowest id natively (it always assumes the id starts from 0), hence we have added the low_id feature, refering to the commit.
Installation
Kalibr is a ROS package, so it is to be cloned into the src/ directory of the caktin workspace.
This version builds on top of the official repository, which:
- works with a calibration board with non-zero
low_id - works correctly with Double Sphere Camera Model
More on catkin build, refer here. To verify the installation, command kalibr_calibrate_cameras should exist.
Optionally to Calibrate IMU-Camera
This step is usually not needed, as the calibration result is generally not accurate, especially in the relative position between the IMU and the cameras.
It might only be useful to serve as a way to determine the mounting position and coordinate systems used in both IMU and the cameras.